上海傅利叶智能科技股份有限公司作为全球领先的通用机器人企业,秉持”以人为本,服务于人”的产品理念,持续探索前沿技术与应用场景的深度融合,打造懂交互、有温度的具身智能。

让机器人来解读人类的语言、表情、动作乃至情绪,并根据不同场景需求提供恰到好处的反馈,这一目标的实现需要多项前沿技术的深度融合与协同创新。
在具身智能技术研发的过程中,动作捕捉系统已成为机器人训练的一大助力。傅利叶与凌云光全资子公司元客视界积极合作,引入FZMotion运动捕捉实验室,通过采集高精度的动作数据,将仿真训练与真机测试相结合,共同形成人形机器人高效训练的完整闭环。

打通具身智能的Real to Sim to Real,不可或缺的动作捕捉系统
斯坦福大学团队在今年5月的一项突破性成果TWIST(Teleoperated Whole-Body Imitation System)系统,通过动作捕捉与学习控制的深度融合,稳定高效的实现了远程操控人形机器人执行全身动作,为通用机器人智能的发展提供了重要技术路径。该研究成果表明,高精度动作捕捉已成为具身智能从仿真到现实迁移的核心基础设施。
元客视界FZMotion运动捕捉系统为机器人运动控制提供现实世界的数据参考基准,用于验证仿真模型的准确性,同时可以校准优化机器人控制算法,以确保仿真训练的策略直接迁移到真实机器人上,减少了现实调试的时间,让算法验证更快的落地到应用场景。尤其是在Sim to Real的转化过程中,高精度动作捕捉数据有效弥补了仿真环境与现实数据的差距,让学习训练成果得以完美复现到实体机器人本体上。

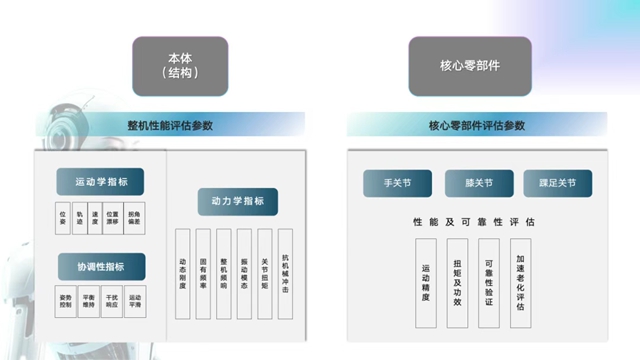
动作捕捉系统是机器人运动性能评测的精准标尺
实时捕捉机器人关节角度、运动轨迹等数据,将关节角度误差控制在0.1°以内,末端执行器精度达亚毫米级,可同时支持多目标并行追踪,全面评估机器人的步态稳定性、姿态控制与操作精度,从足部贴合度到关节角度,从头部晃动到抓取姿态,每一个细节都转化为可量化的数据指标,基于多维度运动参数分析,整机性能与核心零部件评估,构建机器人出厂检测和性能评估指标,为运动控制算法优化、机械结构改进、出厂质量评估提供高质量数据支撑。
创新技术的加入正在成为提升机器人可靠性与智能化的关键环节,行业专家曾说“人类幼崽通过跌倒学会行走,具身智能的进化逻辑与此同源,它需要真实世界的疼痛反馈来塑造智能。”
 微信扫一扫打赏
微信扫一扫打赏
 支付宝扫一扫打赏
支付宝扫一扫打赏