

第二期
面向大空间的
机器人全场域运动数据采集及性能评测
光学#动捕技术以“全域覆盖、高速高精度、多目标并行追踪、复杂环境稳定”为核心优势,克服传统方案在对于动态的复杂多目标场景中目标识别、精度衰减及环境干扰敏感等痛点问题,以技术领先性重构复杂运动分析、高性价比的成本效益为综合优势,成为面向大空间实时精准采集多智能体多模态数据及性能评测的最优解决方案,对无人系统、具身智能、工业自动化等领域控制算法优化提供真值参考。
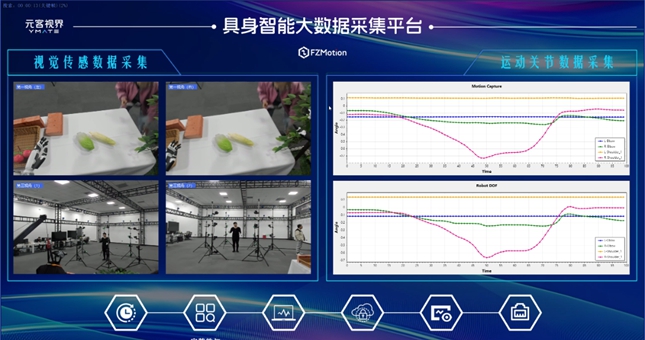
多智能体多模态数据采集与评测
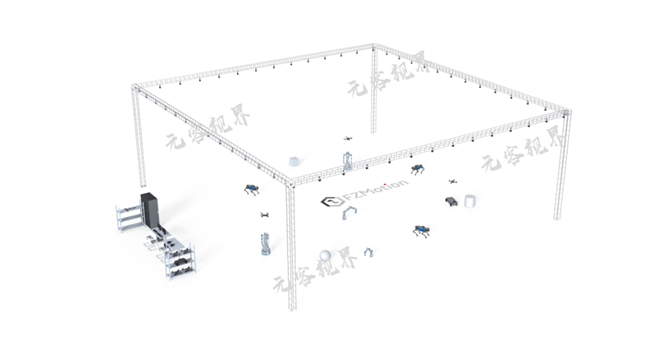
针对大空间场地打造室内评测平台,凭借高精度、低延时稳定的性能主要对智能体进行数据采集与分析。
记录人体动作数据(关节角度、运动轨迹)与机器人响应毫秒级同步, 同时记录一台或多机器人并行采集,构建机器执行数据(身体/手指的骨骼角度、电机控制、视觉/点云/IMU)等多模态关联,通过自研的“具身智能数据采集与处理平台”,确保了数据质量一致性,提升机器人训练效率与任务执行能力。
如多旋翼无人机、无人机研究SLAM算法验证、小车协同控制、仿生翼空间位姿检测、四足机器人/狗、机器人、人 体 等多种异形对象进行运动数据采集与测评,用户利用评测平台采集获取到的数据,深入探讨智能体的运动学特性,进而优化其运动模型,并开发更为智能化的控制算法,也可以让机器人模仿人类的多样化动作与行为,为科研人员在人机交互、人工智能等前沿科技领域的研究提供强有力的支撑,满足研究、科研与比赛等应用需求。
客户案例
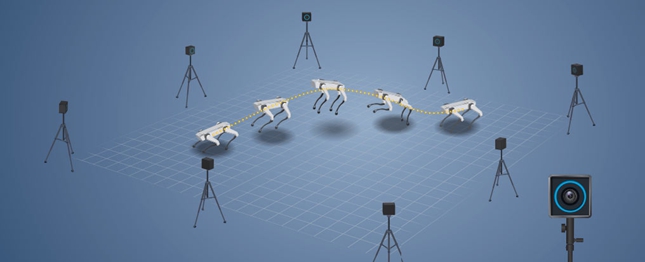
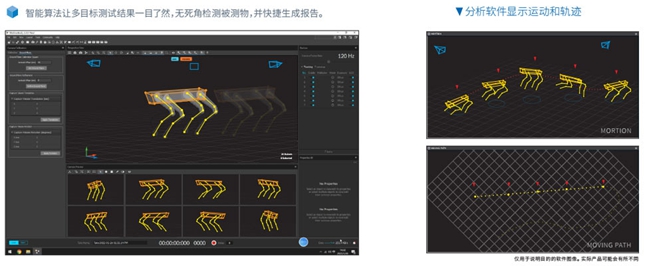
浙江谱麦采用在空间内搭建#元客视界FZMotion动捕相机同时搭载智能分析软件组成“机器人智能检测系统”。
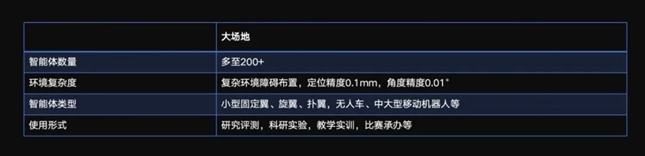
支持20-200㎡大空间内毫米级定位(精度≤0.5mm,角度≤0.1°)
同步检测10+刚体协同追踪
结合机器人性能检测与分析软件,可完美进行实时精准测量机器人运动轨迹、姿态及工作空间覆盖率
现已用于工业、商业、科研等领域服务的人形机器人、智能体的检测,包括但不限于对智能服务机器人、工业机器人、巡检、安防、物流、AGV、无人车/无人机等十余类机器人的性能测试。
 微信扫一扫打赏
微信扫一扫打赏
 支付宝扫一扫打赏
支付宝扫一扫打赏






