摘 要
舵轮(四驱四转)构型得到了广泛的应用。在其控制中,里程估计是一个重要问题。
上海交通大学自动化系IWIN-FINS实验室提出一种名为ICF-DO(信息一致性滤波的分布式里程计)的新型轮式里程计框架,为可转向轮式移动机器人实现低计算复杂度、高鲁棒性的里程估计。
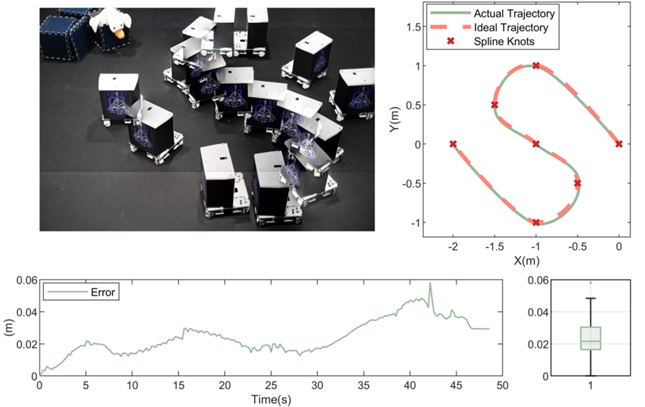
作为实验验证工具,元客视界FZMotion运动捕捉系统作为真实值(Ground Truth)的基准参考,用于验证所提出的分布式里程计(ICF-DO)的精度和可靠性。
相关论文《A Robust Distributed Odometry for Mobile Robots with Steerable Wheels》该研究成果已被机器人顶会IROS 2025收录发表。
研 究 内 容
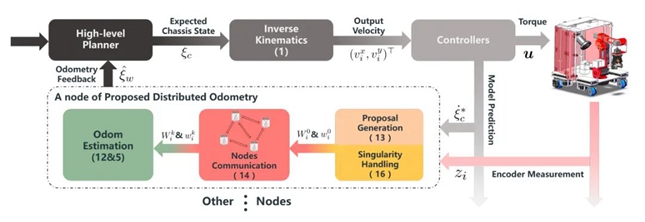
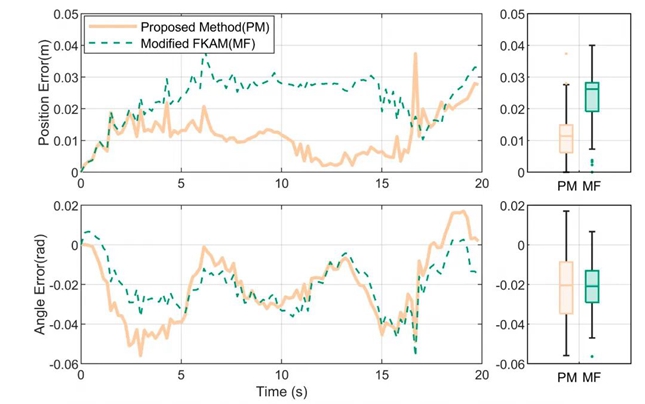
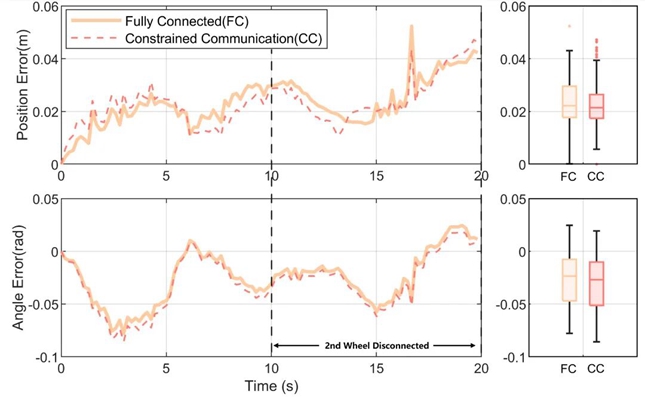
通过刚体运动学的推导,可以得到集中式的底盘速度估计方程。在ICF滤波的框架下,ICF-DO根据各个轮子的编码器信息,分布式估计了底盘的运动状态。并且,该方法能够处理运动学奇异和部分轮子通信断联的问题,且具备较小的计算开销(40+μs@STM32F4)。
实 验 效 果
本文实验基于FZMotion动捕设备,在自主研发的舵轮机器人Fines上仅加装3个红外反光点,便实现了对其空间位姿的实时高精度捕捉。基于捕捉数据回放与分析,我们绘制了论文中的关键结果插图。

实验表明,相较于传统方法,ICF-DO算法在性能上表现更优,并对数据丢包与节点失联等异常场景展现出卓越的鲁棒性。
该算法在嵌入式平台完成部署后,经FZMotion提供的真值数据评估,其有效性与实用性得到了充分验证。
相较于传统定位方式,FZMotion极大程度简化了参数调试与RMSE评估阶段的工作量,使研究人员能将精力聚焦于核心算法与应用研究。此外,相较于其他动捕品牌,FZMotion动捕系统部署简单,仅需对机器人进行微小改动,即可快速获得高精度动捕方案的赋能,显著提升了科研验证的效率。
作 者 补 充 信 息
后续FineMote发布的时候,该方法会随框架一起发布,不进行单独开源。在FineMote加持下,ICF-DO可以很快部署于常见总线电机搭建的舵轮底盘上,原生支持C板与达妙板等机器人开发板。大家可以期待一下后续FineMote的发布。
也欢迎大家持续关注上海交通大学IWIN-FINS实验室的后续工作,课题组也长期招收对舵轮感兴趣的小伙伴。
(B站”上交IWIN-FINS实验室”)
 微信扫一扫打赏
微信扫一扫打赏
 支付宝扫一扫打赏
支付宝扫一扫打赏